Programando a la Araña

1. Ve a: http://arduino.cc/en/main/software y descarga el software de Arduino correspondiente al sistema operativo de tu computadora.
2. Abre Arduino y crea un archivo nuevo.
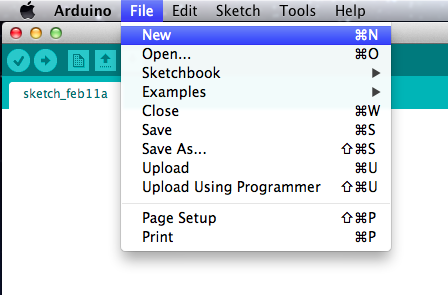
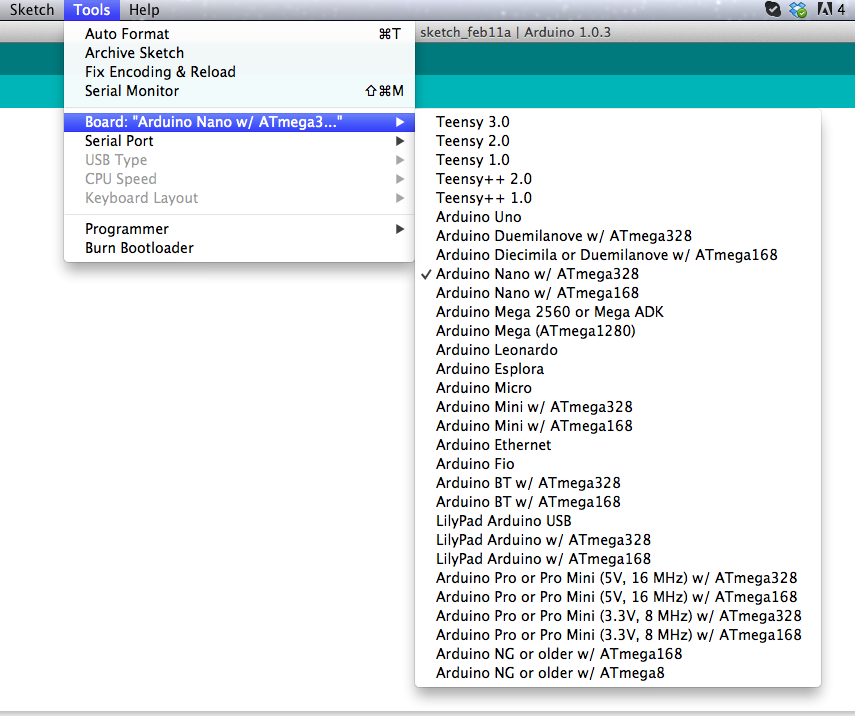
3. Ve a herramientos y selecciona Arduino Nano w/ ATmega328.
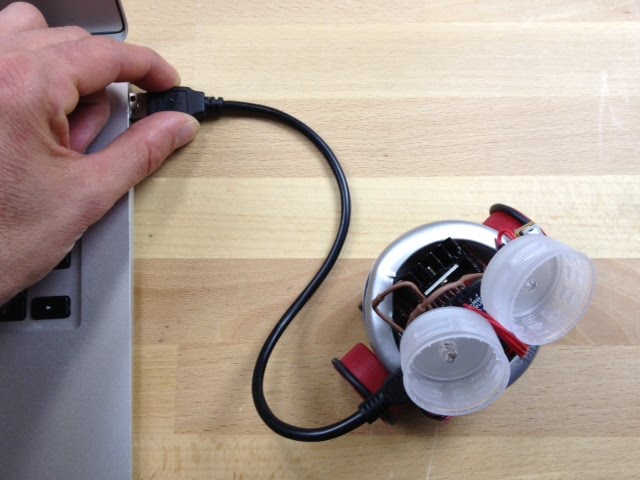
4.Conecta el mini cable USB a tu computadora y el Arduino en tu Araña Robot.
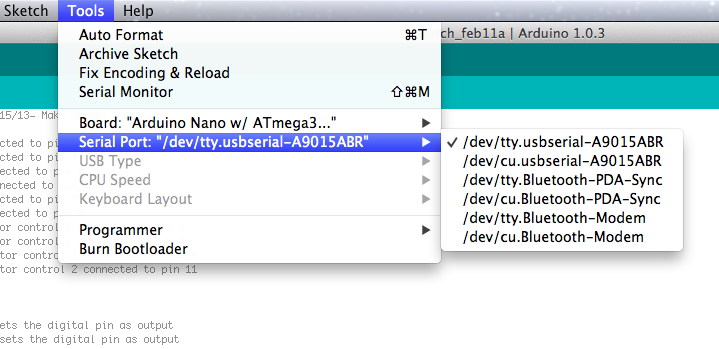
5. Selecciona el siguiente puerto serial.
6. Copia el código de baile que se muestra a continuación (selecciónalo y usa Control + C en una PC o cmd + C en una Mac).
// CÓDIGO DE BAILE para la Araña por Karl Wendt 1/15/13
// Define las salidas de los pines
int Red_Eye_Left= 12; // LED conectado al pin 12
int Red_Eye_Right= 4; // LED conectado al pin 4
int Green_Eye_Left= 8; // LED conectado al pin 8
int Green_Eye_Right= 3; // LED conectado al pin 3
int Blue_Eye_Left= 7; // LED conectado al pin 7
int Blue_Eye_Right= 2; // LED conectado al pin 2
int Left_Reverse = 6; // Control 1 del motor derecho conectado al pin 6
int Left_Forward = 9; // Control 2 del motor derecho conectado al pin 9
int Right_Forward = 10; // Control 1 del motor izquierdo conectado al pin 10
int Right_Reverse = 11; // Control 2 del motor izquierdo conectado al pin 11
// Define las salidas de los pines
int Red_Eye_Left= 12; // LED conectado al pin 12
int Red_Eye_Right= 4; // LED conectado al pin 4
int Green_Eye_Left= 8; // LED conectado al pin 8
int Green_Eye_Right= 3; // LED conectado al pin 3
int Blue_Eye_Left= 7; // LED conectado al pin 7
int Blue_Eye_Right= 2; // LED conectado al pin 2
int Left_Reverse = 6; // Control 1 del motor derecho conectado al pin 6
int Left_Forward = 9; // Control 2 del motor derecho conectado al pin 9
int Right_Forward = 10; // Control 1 del motor izquierdo conectado al pin 10
int Right_Reverse = 11; // Control 2 del motor izquierdo conectado al pin 11
// Set the mode of the pin (output or input)
void setup() {
void setup() {
pinMode(Red_Eye_Left, OUTPUT); //sets the digital pin as output
pinMode(Red_Eye_Right, OUTPUT); //sets the digital pin as output
pinMode(Green_Eye_Left, OUTPUT); //sets the digital pin as output
pinMode(Green_Eye_Right, OUTPUT); //sets the digital pin as output
pinMode(Blue_Eye_Left, OUTPUT); //sets the digital pin as output
pinMode(Blue_Eye_Right, OUTPUT); //sets the digital pin as output
pinMode(Left_Forward, OUTPUT); // sets L1 the digital pin as output
pinMode(Left_Reverse, OUTPUT); // sets L2 the digital pin as output
pinMode(Right_Forward, OUTPUT); // sets L3 the digital pin as output
pinMode(Right_Reverse, OUTPUT); // sets L4 the digital pin as output
}
pinMode(Red_Eye_Right, OUTPUT); //sets the digital pin as output
pinMode(Green_Eye_Left, OUTPUT); //sets the digital pin as output
pinMode(Green_Eye_Right, OUTPUT); //sets the digital pin as output
pinMode(Blue_Eye_Left, OUTPUT); //sets the digital pin as output
pinMode(Blue_Eye_Right, OUTPUT); //sets the digital pin as output
pinMode(Left_Forward, OUTPUT); // sets L1 the digital pin as output
pinMode(Left_Reverse, OUTPUT); // sets L2 the digital pin as output
pinMode(Right_Forward, OUTPUT); // sets L3 the digital pin as output
pinMode(Right_Reverse, OUTPUT); // sets L4 the digital pin as output
}
// Crea el código de tu bucle
void loop() {
digitalWrite(Red_Eye_Left, HIGH); //enciende el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, HIGH); //enciende el LED rojo del ojo derecho
delay(500); //se ejecuta por medio segundo
digitalWrite(Red_Eye_Left, LOW); //apaga el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, LOW); //apaga el LED rojo del ojo izquierdo
digitalWrite(Green_Eye_Left, HIGH); //enciende el LED verde del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Green_Eye_Left, LOW); //apaga el LED verde del ojo izquierdo
digitalWrite(Blue_Eye_Left, HIGH); //enciende el LED azul del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Blue_Eye_Left, LOW); //enciende el LED azul del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Green_Eye_Right, HIGH); //enciende el LED verde del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Green_Eye_Right, LOW); //enciende el LED verde del ojo derecho
digitalWrite(Blue_Eye_Right, HIGH); //enciende el LED azul del ojo derecho
delay(500); //se ejecuta por medio segundo
digitalWrite(Blue_Eye_Right, LOW); //apaga el LED azul del ojo derecho
delay(500); //se ejecuta por medio segundo
//Haz nuevos colores al combinar la luz de los LEDs
digitalWrite(Blue_Eye_Left, HIGH); //enciende LED azul del ojo izquierdo
digitalWrite(Blue_Eye_Right, HIGH); //enciende el LED azul del ojo derecho
digitalWrite(Red_Eye_Left, HIGH); //enciende el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, HIGH); //enciende el LED rojo del ojo derecho
delay(1000); //se ejecuta por medio segundo
digitalWrite(Blue_Eye_Left, LOW); //enciende el LED azul del ojo izquierdo
digitalWrite(Blue_Eye_Right, LOW); //enciende el LED azul del ojo derecho
digitalWrite(Green_Eye_Left, HIGH); //enciende el LED verde del ojo izquierdo
digitalWrite(Green_Eye_Right, HIGH); //enciende el LED verde del ojo derecho
digitalWrite(Red_Eye_Left, HIGH); //enciende el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, LOW); //enciende el LED rojo del ojo derecho
delay(1000); //se ejecuta por un cuarto de segundo
//enciende los motores y hace que la Araña se mueva
analogWrite(Left_Reverse, 90); //activa el motor izquierdo hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Left_Reverse, 0); //detiene el motor izquierdo
delay(200); //se ejecuta por 2 segundos
analogWrite(Right_Reverse, 90); //activa el motor derecho hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Reverse, 0); //detiene el motor derecho
analogWrite(Left_Forward, 90); //activa el motor izquierdo hacia adelante con una rapidez PWM de 90
delay(500); //espera medio segundo
analogWrite(Left_Forward, 0); //detiene el motor izquierdo
analogWrite(Right_Forward, 90); //activa el motor derecho hacia adelante con una rapidez de PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Forward, 0); //detiene el motor derecho
analogWrite(Left_Reverse, 90); //activa el motor izquierdo hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Left_Reverse, 0); //detiene el motor izquierdo
delay(200); //se ejecuta por 2 segundos
analogWrite(Right_Reverse, 90); //activa el motor derecho hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Reverse, 0); //detiene motor derecho
analogWrite(Left_Forward, 90); //activa el motor izquierdo hacia adelante con una rapidez PWM de 90
delay(500); //espera medio segundo
analogWrite(Left_Forward, 0); //detiene el motor izquierdo
analogWrite(Right_Forward, 90); //activa el motor derecho hacia adelante con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Forward, 0); //detiene el motor derecho
}
void loop() {
digitalWrite(Red_Eye_Left, HIGH); //enciende el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, HIGH); //enciende el LED rojo del ojo derecho
delay(500); //se ejecuta por medio segundo
digitalWrite(Red_Eye_Left, LOW); //apaga el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, LOW); //apaga el LED rojo del ojo izquierdo
digitalWrite(Green_Eye_Left, HIGH); //enciende el LED verde del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Green_Eye_Left, LOW); //apaga el LED verde del ojo izquierdo
digitalWrite(Blue_Eye_Left, HIGH); //enciende el LED azul del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Blue_Eye_Left, LOW); //enciende el LED azul del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Green_Eye_Right, HIGH); //enciende el LED verde del ojo izquierdo
delay(500); //se ejecuta por medio segundo
digitalWrite(Green_Eye_Right, LOW); //enciende el LED verde del ojo derecho
digitalWrite(Blue_Eye_Right, HIGH); //enciende el LED azul del ojo derecho
delay(500); //se ejecuta por medio segundo
digitalWrite(Blue_Eye_Right, LOW); //apaga el LED azul del ojo derecho
delay(500); //se ejecuta por medio segundo
//Haz nuevos colores al combinar la luz de los LEDs
digitalWrite(Blue_Eye_Left, HIGH); //enciende LED azul del ojo izquierdo
digitalWrite(Blue_Eye_Right, HIGH); //enciende el LED azul del ojo derecho
digitalWrite(Red_Eye_Left, HIGH); //enciende el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, HIGH); //enciende el LED rojo del ojo derecho
delay(1000); //se ejecuta por medio segundo
digitalWrite(Blue_Eye_Left, LOW); //enciende el LED azul del ojo izquierdo
digitalWrite(Blue_Eye_Right, LOW); //enciende el LED azul del ojo derecho
digitalWrite(Green_Eye_Left, HIGH); //enciende el LED verde del ojo izquierdo
digitalWrite(Green_Eye_Right, HIGH); //enciende el LED verde del ojo derecho
digitalWrite(Red_Eye_Left, HIGH); //enciende el LED rojo del ojo izquierdo
digitalWrite(Red_Eye_Right, LOW); //enciende el LED rojo del ojo derecho
delay(1000); //se ejecuta por un cuarto de segundo
//enciende los motores y hace que la Araña se mueva
analogWrite(Left_Reverse, 90); //activa el motor izquierdo hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Left_Reverse, 0); //detiene el motor izquierdo
delay(200); //se ejecuta por 2 segundos
analogWrite(Right_Reverse, 90); //activa el motor derecho hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Reverse, 0); //detiene el motor derecho
analogWrite(Left_Forward, 90); //activa el motor izquierdo hacia adelante con una rapidez PWM de 90
delay(500); //espera medio segundo
analogWrite(Left_Forward, 0); //detiene el motor izquierdo
analogWrite(Right_Forward, 90); //activa el motor derecho hacia adelante con una rapidez de PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Forward, 0); //detiene el motor derecho
analogWrite(Left_Reverse, 90); //activa el motor izquierdo hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Left_Reverse, 0); //detiene el motor izquierdo
delay(200); //se ejecuta por 2 segundos
analogWrite(Right_Reverse, 90); //activa el motor derecho hacia atrás con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Reverse, 0); //detiene motor derecho
analogWrite(Left_Forward, 90); //activa el motor izquierdo hacia adelante con una rapidez PWM de 90
delay(500); //espera medio segundo
analogWrite(Left_Forward, 0); //detiene el motor izquierdo
analogWrite(Right_Forward, 90); //activa el motor derecho hacia adelante con una rapidez PWM de 90
delay(500); //se ejecuta por medio segundo
analogWrite(Right_Forward, 0); //detiene el motor derecho
}
7. Pega el código en el nuevo archivo Arduino que acabas de crear (coloca el cursor en tu bosquejo de Arduino y presiona Ctrl+v o cmd+v).
8. Cárgale el código a tu araña robot haciendo clic en la flecha horizontal.
9. Desconecta el cable USB.
10. ¡Enciende tu araña y obsérvala bailar!
11. Puede que necesites aumentarle la velocidad del motor si la araña no se está moviendo lo suficientemente rápido.
ADVERTENCIA: Asegúrate de que tu araña robot esté en un piso plano (NO SOBRE UNA MESA), todavía NO está programada para evitar los bordes de la mesa, se puede caer y romper.
Comentarios
Publicar un comentario